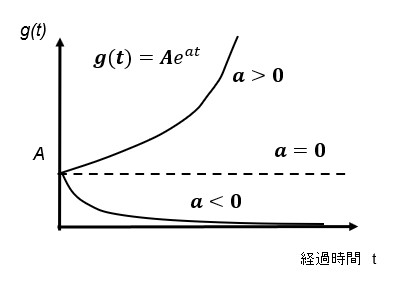
遅れ 制御 E At

やさしい自動制御のお話 アズビル株式会社
出力時間遅れのあるシステムに対する制御方法 Qiita
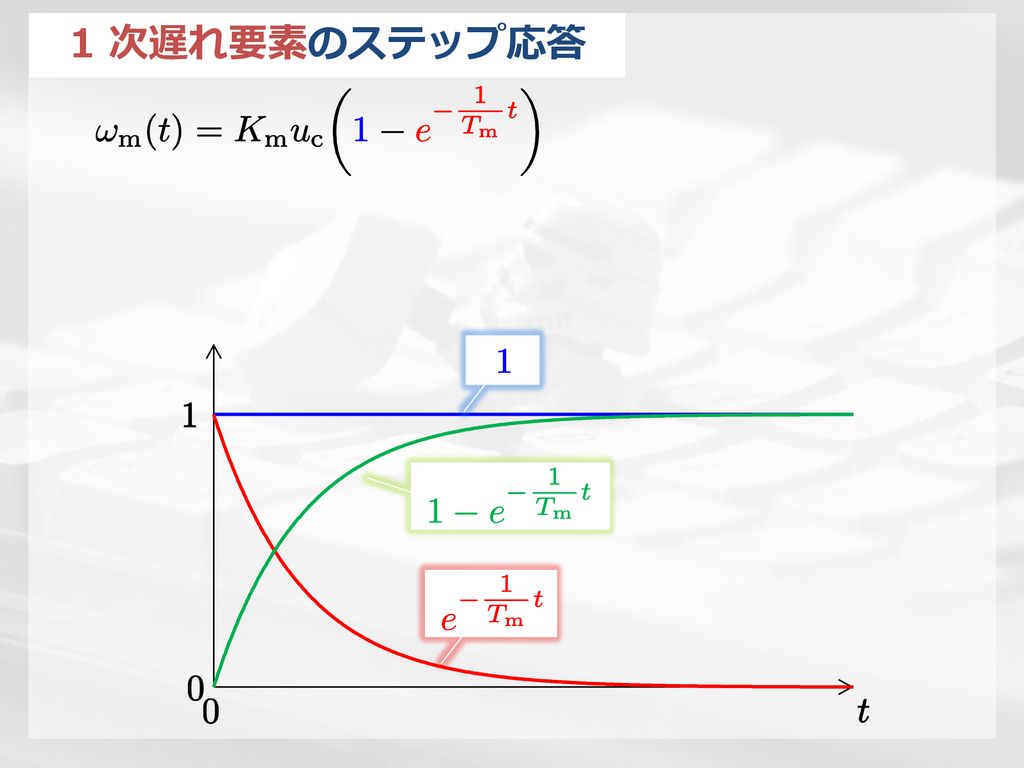
モデルに基づいた Pid コントローラの設計 Mbd とは モータ駆動系のモデリング モデルマッチング 5 1 節 出力を角速度とした場合 Ppt Download
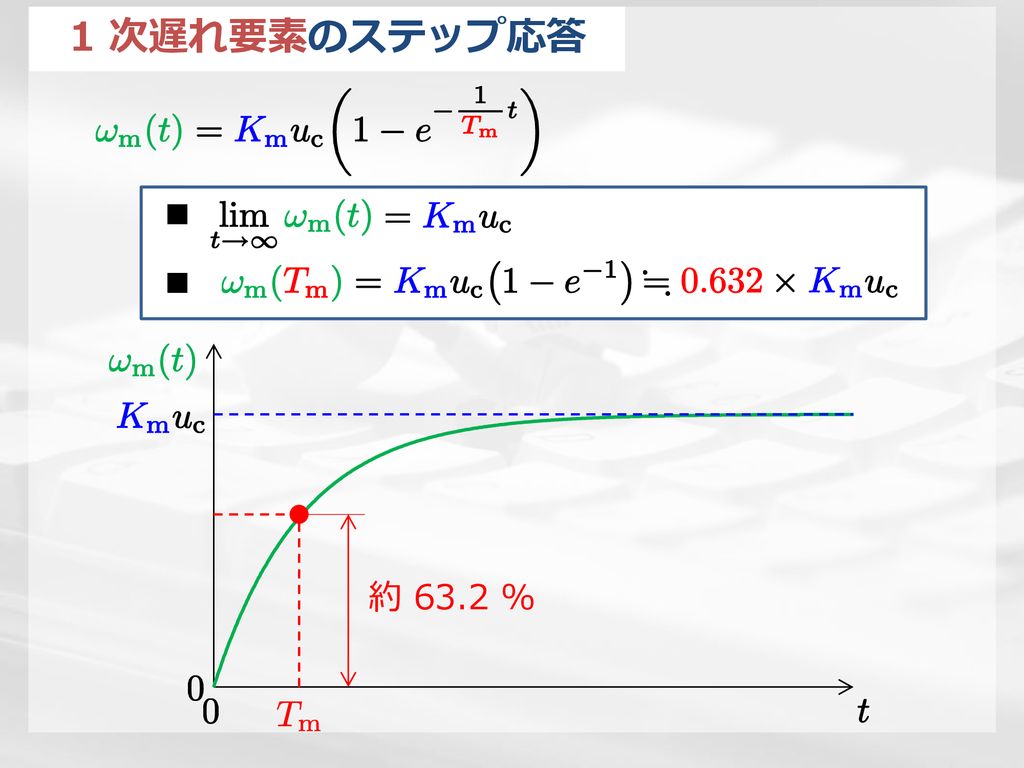
モデルに基づいた Pid コントローラの設計 Mbd とは モータ駆動系のモデリング モデルマッチング 5 1 節 出力を角速度とした場合 Ppt Download
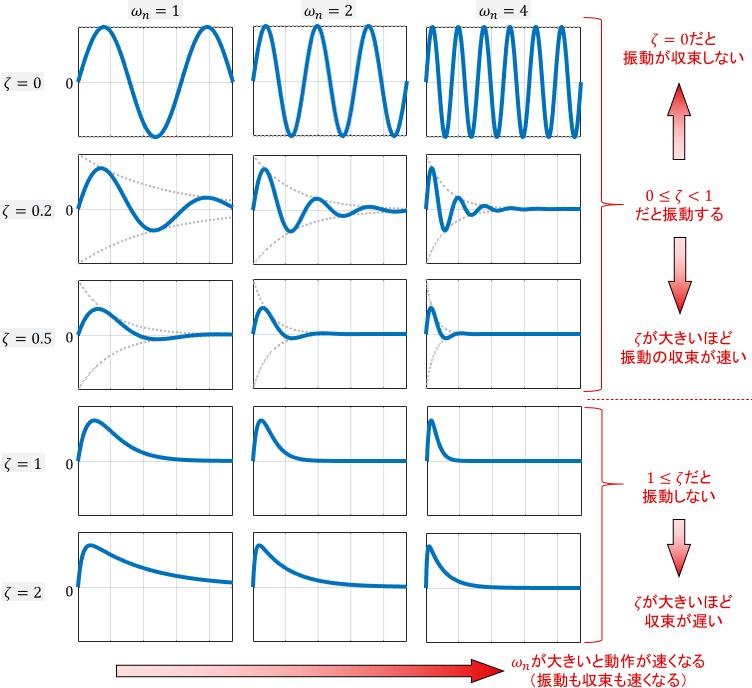
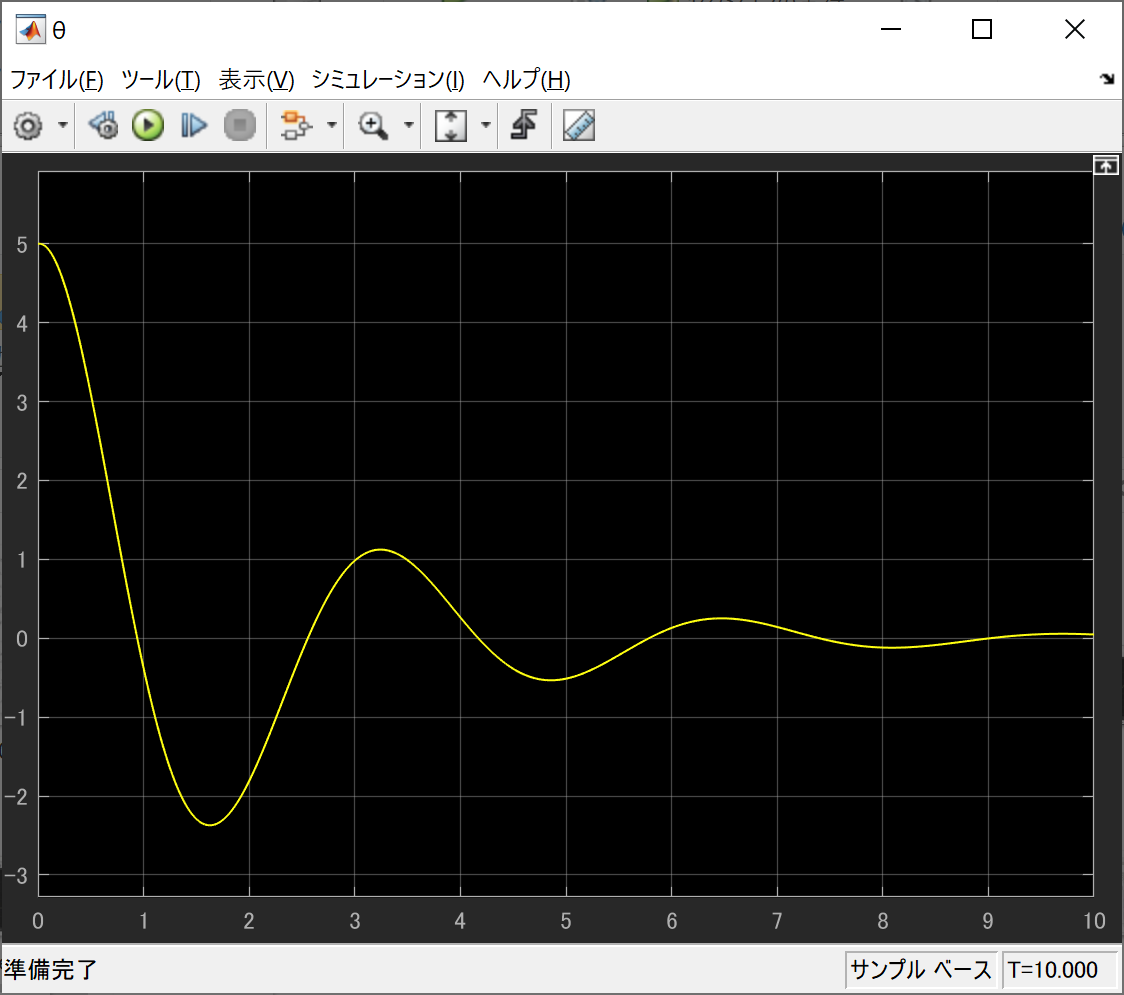
2次システムのインパルス応答 ステップ応答 特性と使い方を解説
実践で使えるフィードバック制御 やさしい制御解析の勘所 即戦力モノづくり エンジニアへの道標
1
2

2次遅れ系の伝達関数を逆ラプラス変換して 求められた微分方程式を解く そらたまご Soratamago

2021 040385号 インバータ装置およびインバータ装置の制御方法 Astamuse
Pythonで学ぶ制御工学 第22弾 位相進み遅れ補償 Qiita
You have just read the article entitled 遅れ 制御 E At. You can also bookmark this page with the URL : https://expansionsuppo.blogspot.com/2022/03/e-at.html
0 Response to "遅れ 制御 E At"
Post a Comment